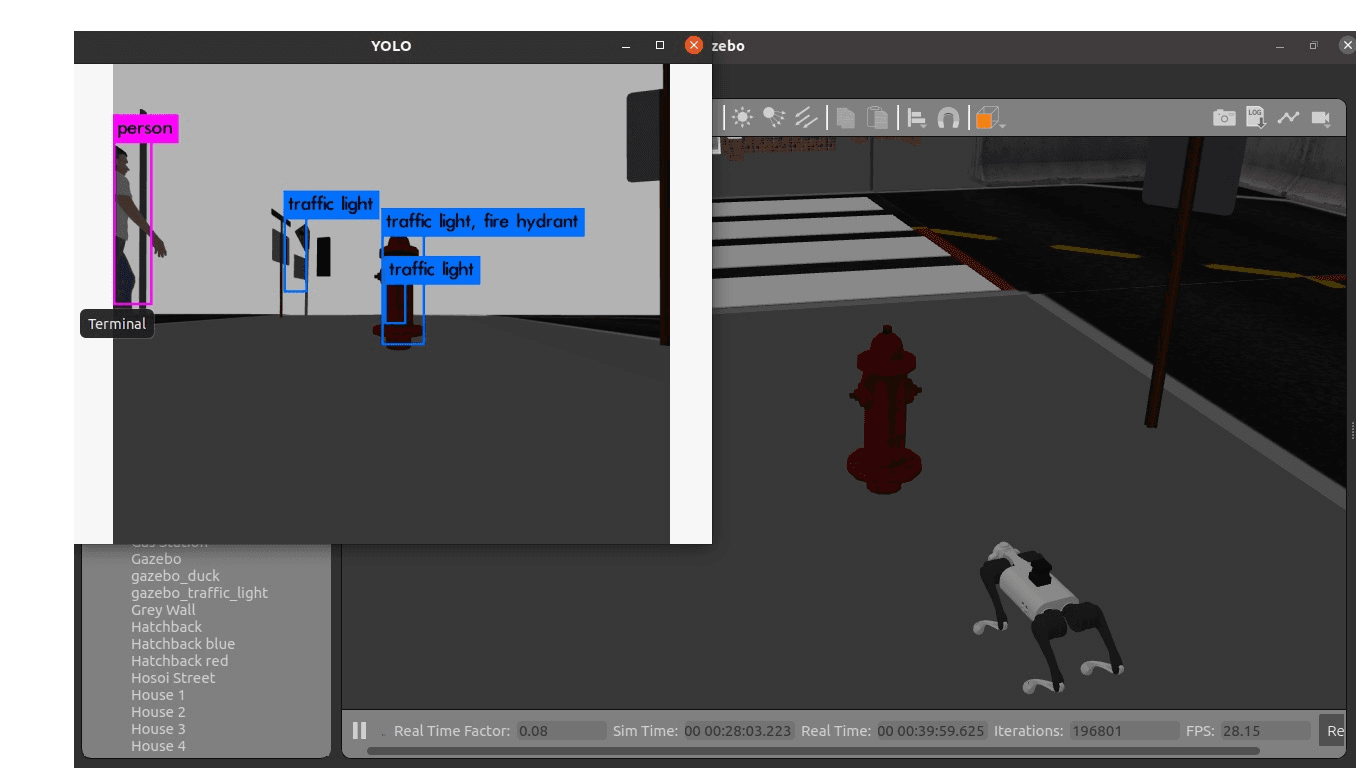
Perception is a separate subsystem, not a locomotion concern
Decoupling perception from the Unitree locomotion stack meant detection quality could be evaluated and tuned independently, and the same perception layer could be reused in simulation and on hardware.